
Proposed Approach
The ultimate aim of the project is to have an integrated retrieval algorithm for making AOD and BRDF products from TROPOMI using the GRASP approach. In addition to the integrated algorithm products, there will also be intermediate products of AOD and BRDF based on the OMI-heritage algorithms.
The integration approach proposed in this work is schematically here:
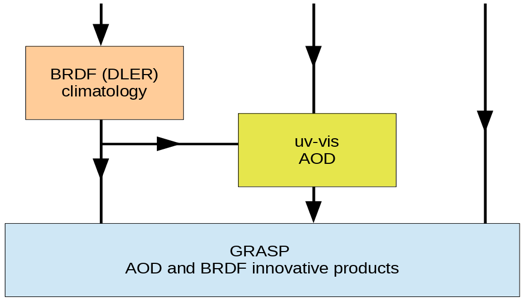
One key element of the approach employed in this project is utilization of Generalized Retrieval of Aerosol and Surface Properties (GRASP) as a state-of-the-art retrieval strategy for generating enhanced aerosol and BRDF products from Sentinel-5p. GRASP is a recently developed (Dubovik et al. 2011, 2014) open source (https://www.grasp-open.com) versatile algorithm that provides simultaneous retrieval of both aerosol and surface properties from diverse satellite and ground-based passive and active observations. GRASP retrieval is implemented as highly advanced statistically optimized fitting of all available observations.
In addition, GRASP uses an innovative multi-pixel concept in which the fitting is realized simultaneously for large group of “pixels” (coordinated observations). This principle is especially useful for improving satellite retrievals where it allows benefitting from known a priori limitations on space and time variability of different surface and aerosol parameters. This helps reliable discrimination between aerosol and surface contributions in observation that is generally known as a challenging issue. Application of such a multi-pixel strategy is particularly important for improving retrieval from single-view satellite observations as those from Sentinel-5p, because the concept ensures uniqueness of the solution even if the number of unknowns for each individual pixel is quite high. In addition, GRASP is based on positive retrieval heritage. Specifically, the approach has originated from the AERONET retrieval and was improved and extended for the interpretation of satellite and airborne observations, both by passive and active sensors. Therefore, the concept and the software have been polished in diverse applications. For example, GRASP was applied for processing observations from multiple satellite sensors such as POLDER/Parasol, MERIS/Envisat, MISR/Terra, and is being selected as operational algorithm for future missions such as 3MI/Metop, Sentinel-4. Furthermore, the GRASP concept is highly suitable for synergy retrieval. At present, it is employed for processing combined observations from ground-based radiometers and lidars in the European ACTRIS network.
It should be noted that GRASP, as follows from the name of the approach, is aimed on simultaneous retrieval of aerosol and surface. As described in the formulation of the algorithm, such a strategy results in the retrieval of fully radiatively consistent aerosol and BRDF parameters of higher accuracy compared to the conventional approaches, in which surface and aerosol properties are derived separately. Additionally, GRASP is a very flexible algorithm built on rather general principles and can be easily changed and adjusted if any potential improvement is identified.
Another key element of the approach employed in this project is the consideration of all positive previous experiences in development and exploitation of aerosol and surface retrievals from TOMS, GOME(-2), SCIAMACHY and OMI UV sensors. This includes the benefit from rather specific knowledge regarding particular features important for the development of an adequate forward Radiative Transfer (RT) model, regarding uncertainties and potential issues typical for UV spectrometers, known data sensitivities of the observations, general strength and weaknesses of used developed approaches, etc. For example, conventional OMI-like algorithms implemented pre-calculated Look-Up-Tables (LUT), therefore such algorithms are much faster than GRASP, which implements all RT calculations online during the retrieval. Therefore, results of such algorithms can be used for optimizing GRASP initialization or express checking of some retrieval assumptions. Finally, having a possibility of comparing results of algorithms using fundamentally different concepts is always highly beneficial to assure robust progress in the retrieval development.
The consortium of the project includes the core teams of specialists closely involved in the original development and exploitations of both GRASP and OMI algorithms that assures the best composition of the project team for successful realization of the project following above described development approach.