
GROSAT Description
Reflectance of the Earth surface is one of the major natural components affecting climate. Surface interaction with incoming solar radiation and the atmosphere has a substantial impact on the Earth’s energy budget. Moreover, the accurate description of the surface reflection is crucial for different atmospheric studies including aerosol and trace gases characterization.
One of the grand science challenges in remote sensing and climate studies is the accurate separation of surface and atmosphere contributions to the satellite signal. This separation is a crucial requirement of any algorithm for the accurate retrieval of atmosphere and surface properties from remote sensing measurements (Dubovik et al., 2011, 2021; Hasekamp et al., 2011).
Despite the evident need for the universal and robust reference dataset for surface reflectance, BRDF (Bidirectional Distribution Function) and BPDF (Bidirectional Polarization Distribution Function) retrieval validation, it still does not exist.
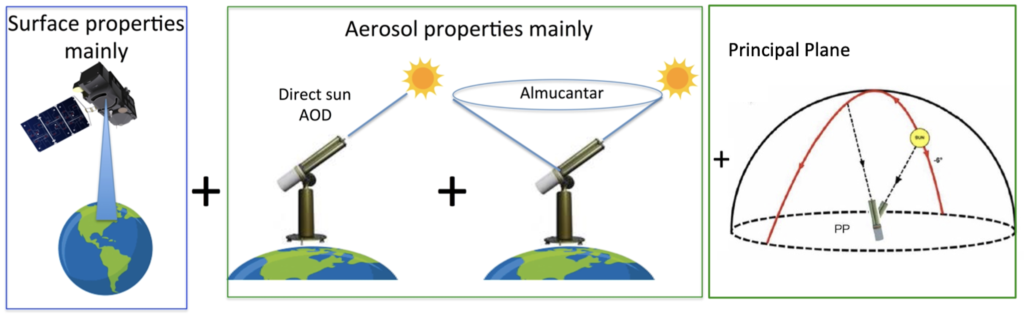
In this project it is proposed to perform a simultaneous synergistic retrieval of aerosol and surface properties using combined ground-based (for example, AERONET) and satellite measurements for obtaining the surface reflectance product with enhanced accuracy (Figure 1). In such approach the main information about aerosol comes from AERONET direct sun and diffuse sky-radiance measurements, whereas the information about surface reflection properties originates from satellite observations. The synergetic AERONET+satellite retrieval approach has already been prototyped within GRASP algorithm in the frame of ESA S5P+Innovative AOD/BRDF (Litvinov et al., 2020; https://eo4society.esa.int/projects/sentinel-5pinnovation).
Further adjustment of GRASP algorithm to the synergistic retrieval from the combined ground-based (AERONET) and satellite measurements provides new possibilities for aerosol and surface characterization. This GRASP synergetic approach promises to become a rather robust and universal tool that can be applied to any space-borne instruments independently of spatial resolution or information content: for any spectral bands, radiance only or polarimetric measurements, single or multiple view instruments.
GROSAT satelites
The synergetic AERONET+satellite retrieval in GROSAT will be applied and tested on different satellites with different measurement possibilities and spatial resolution: Sentinel-2, Sentinel-3, Sentinel-5p, PARASOL/POLDER (Table 1).
GROSAT satellites:
| Satellite | Description | Spatial Resolution of the reference dataset |
| S2/MSI | 1 observation per pixel, high spatial resolution, radiance measurements in VIS, NIR, SWIR spectral range | 20m – 1km |
| S3/OLCI | 1 observation per pixel, moderate spatial resolution, radiance measurements in VIS and NIR, spectral range | 500m – 10km |
| PARASOL/POLDER | Multi-angular polarimeter, coarse spatial resolution, measurements in VIS and NIR, spectral range | 6km |
| S5p/TROPOMI | 1 observation per pixel, moderate spatial resolution, radiance measurements in VIS, NIR, SWIR spectral range | 10km |
Surface Reference/Validation Dataset
In the frame of GROSAT project the surface reference/validation dataset will be generated for 1 year period over 30 AERONET stations listed in the Table 3. Depending on satellite measurement capabilities the list of surface characteristics from the synergetic retrieval can be very extensive and include:
- Surface total and polarized reflectance at the measured geometry
- Directional Hemispherical reflectance (DHR, black-sky albedo)
- Isotropic BiHemispherical Reflectance (BHRiso, white-sky albedos)
- Parameters of BRDF and BPDF.
All surface characteristics will be provided as daily, 15 days average, and monthly datasets.
Derived surface reference dataset will be inter-compared with available surface databases: MODIS, PARASOL, RadCalNet, Hypernets etc.
30 AERONET stations of GROSAT surface reference datasets:
| AERONET station | Longitude | Latitude | Elevation | |
| 1 | Banizoumbou | 2.665190 | 13.546930 | 274 |
| 2 | Mongu | 23.150833 | -15.253611 | 1047 |
| 3 | Kanpur | 80.231639 | 26.512778 | 123 |
| 4 | Beijing | 116.381370 | 39.976890 | 92 |
| 5 | Ilorin | 4.674500 | 8.484100 | 400 |
| 6 | Solar_Village | 46.397286 | 24.906933 | 764 |
| 7 | Alta_Floresta | -56.104453 | -9.871339 | 277 |
| 8 | Ji_Parana_SE | -61.85152 | -10.93425 | 218 |
| 9 | Cuiaba | -56.070214 | -15.555244 | 234 |
| 10 | Mexico_City | -99.181667 | 19.333611 | 2268 |
| 11 | CART_SITE | -97.48639 | 36.60667 | 318 |
| 12 | GSFC | -76.839833 | 38.992500 | 87 |
| 13 | Lille | 3.141667 | 50.611667 | 60 |
| 14 | Ispra | 8.626700 | 45.803050 | 235 |
| 15 | Thessaloniki | 22.960000 | 40.630000 | 60 |
| 16 | Moldova | 28.815600 | 47.000800 | 205 |
| 17 | Tomsk | 85.048060 | 56.475351 | 174 |
| 18 | Lake_Argyle | 128.748500 | -16.108100 | 150 |
| 19 | Paris | 2.355508 | 48.846797 | 50 |
| 20 | Chiang_Mai | 98.986944 | 18.813333 | 324 |
| 21 | Cabauw | 4.927000 | 51.971000 | -0.7 |
| 22 | Granada | -3.605000 | 37.164000 | 680 |
| 23 | SANTA_CRUZ_UTEPSA | -63.200961 | -17.767325 | 432 |
| 24 | Ames | -93.774778 | 42.021361 | 338 |
| 25 | Saada | -8.155830 | 31.625830 | 420 |
| 26 | Belsk | 20.791667 | 51.836667 | 190 |
| 27 | Kyiv | 30.496667 | 50.363611 | 200 |
| 28 | UCSB | -119.845360 | 34.415428 | 33 |
| 29 | Dushanbe | 68.857911 | 38.553264 | 821 |
| 30 | Karlsruhe | 8.427900 | 49.093300 | 140 |
Project Consortium
GRASP Earth shorten from ‘Generalized Retrieval of Atmosphere and Surface Properties” is a company that was founded in February 2015 with the main goal of development of remote sensing algorithms and scientific methods for environment studies of atmosphere and surface of the Earth. The initial idea of GRASP has been developed by the efforts of CNRS and University of Lille. Then this base scientific concept has been realized in open-source GRASP-OPEN software adapted to diverse remote sensing applications. The main GRASP SAS activities cover a wide range of remote sensing topics: – Developments of algorithms for advanced atmosphere and surface characterization from passive and active ground based and space-borne remote sensing. – Scientific consulting in environmental studies. – Distribution and support of GRASP open source code. Since its creation, GRASP SAS has been involved in collaboration with world-wide environmental public organizations and private companies, universities and the largest space agencies (ESA, EUMETSAT, NASA, JAXA) with the goal to improve the scientific knowledge of the atmosphere and surface properties, which have an essential impact on Earth climate, and tightly interconnected with human activities. The GRASP code was developed for advanced aerosol and surface retrieval from remote sensing measurements. GRASP SAS is composed by a unique team with full understanding all aspects of the code: physical and mathematical basis, software optimization etc. GRASP team has leaded several projects to retrieve atmosphere and surface parameters from different satellite sensors (PARASOL, MERIS, Sentinel 3 and 4, 3MI).
Cloudflight Austria GmbH was founded as Catalysts GmbH in 2007 and has grown to over 400 employees distributed over offices in Austria, Germany, Romania and The Netherlands. We develop individual software solutions for industry, agencies, and the public sector focusing on Big Data and Machine Learning (batch processing of Tera- and Petabytes, process of data streams in real time or near real time), High Performance Computing (acceleration of algorithms), and Large-Scale Agile Projects (large-scale agile software projects „On Time & On Budget“). Cloudflight’s large international customer base includes Porsche/Volkswagen, Fraport, DB, Raiffeisen, EUMETSAT, and the European Space Agency. Our customers value our solid problem-solving competence so that they can grow further. Cooperation exists with several national and international universities, including the Technical Universities of Vienna and Graz, the LOA at the University of Lille, the Free University of Berlin, the Kindai University in Osaka, the Austrian Met-Office ZAMG, the Austrian Environmental Agency Umweltbundesamt, the German DLR, and NASA. As part of the consortium carrying out the “Sentinel-4 Level 2 Processor Component Development” project for ESA, Cloudflight is providing the prototype and operational processors for surface and aerosol optical depth for the Sentinel-4 mission using the GRASP algorithm. The processors will be integrated in EUMETSAT’s MTG Level 2 Processing Facility. In the frame of the ESA CAWA project, “Advanced clouds, aerosols and water vapor products for Sentinel-3” the MERIS/Envisat full mission and 6 months of OLCI/S3A were reprocessed using GRASP as precursor for improved Sentinel-3 L2 products. In the frame of the EUMETSAT study “Study on Optimization of the GRASP Algorithm for the 3MI L2 Aerosol Retrieval”, Cloudflight and GRASP SAS are preparing the integration of the GRASP algorithm into the EPS-SG ground segment as operational Level 2 processor for Aerosol and Surface Reflectance for the Multi-viewing Multi-channel Multi-polarization Imaging instrument, 3MI. 3MI can be considered an operational successor of the PARASOL mission, and will provide the best basis for future aerosol characterization from satellites. In the frame of the “GRASP Cloud project” tasked by the Beyond Europe Initiative of the Austrian Federal Ministry of Science, Research, and Economy, BMWFW, Cloudflight is developing a cloud service for data processing using the GRASP algorithm, together with GRASP SAS (France), EODC (Austria), NASA (JPL and GSFC, USA), Airphotons (USA), Kindai University (Japan), and RADI (China). The service offered by the GRASP Cloud is the processing of Satellite, Ground-Station, and in-situ observations for public agencies and private enterprises.
Publications
- Dubovik, O., Herman, M., Holdak, et al.: Statistically optimized inversion algorithm for enhanced retrieval of aerosol properties from spectral multi–angle polarimetric satellite observations, Atmos. Meas. Tech., 4, 975-1018, 2011. doi:10.5194/amt-4-975-2011
- Dubovik O., Fuertes D., Litvinov P., Lopatin A., Lapyonok T., Doubovik I., Xu F., Ducos F., Chen C., Torres B., Derimian Y., Li L., Herreras-Giralda M., Herrera M., Karol Y., Matar C., Schuster G.L., Espinosa R., Puthukkudy A., Li Z., Fischer J., Preusker R., Cuesta J., Kreuter A., Cede A., Aspetsberger M., Marth D., Bindreiter L., Hangler A., Lanzinger V., Holter C. and Federspiel C.: A Comprehensive Description of Multi-Term LSM for Applying Multiple a Priori Constraints in Problems of Atmospheric Remote Sensing: GRASP Algorithm, Concept, and Applications. Front. Remote Sens. 2:706851, 2021. doi:10.3389/frsen.2021.706851
- Hasekamp, O. P., Litvinov, P., and Butz, A., 2011: Aerosol properties over the ocean from PARASOL multi-angle photopolarimetric measurements, J. Geophys. Res., 116, D14204, 2011. doi:10.1029/2010JD015469
- Lytvynov, C. Cheng, O.Dubovik et al. ESA S5p+I AOD/BRDF Validation Report (VR); issue 0.0.3l date :2020-06-16. https://www.grasp-sas.com/projects/aod-brdf_sentinel-5p-innovation/
- Litvinov P., O. Dubovik, Ch. Cheng, B. Torres, I. Dubovik et al. Combined Retrieval from Ground Based and Space-borne Measurements: New Possibilities for Surface Validation and Beyond. AGU, 1-17 December, 2020.